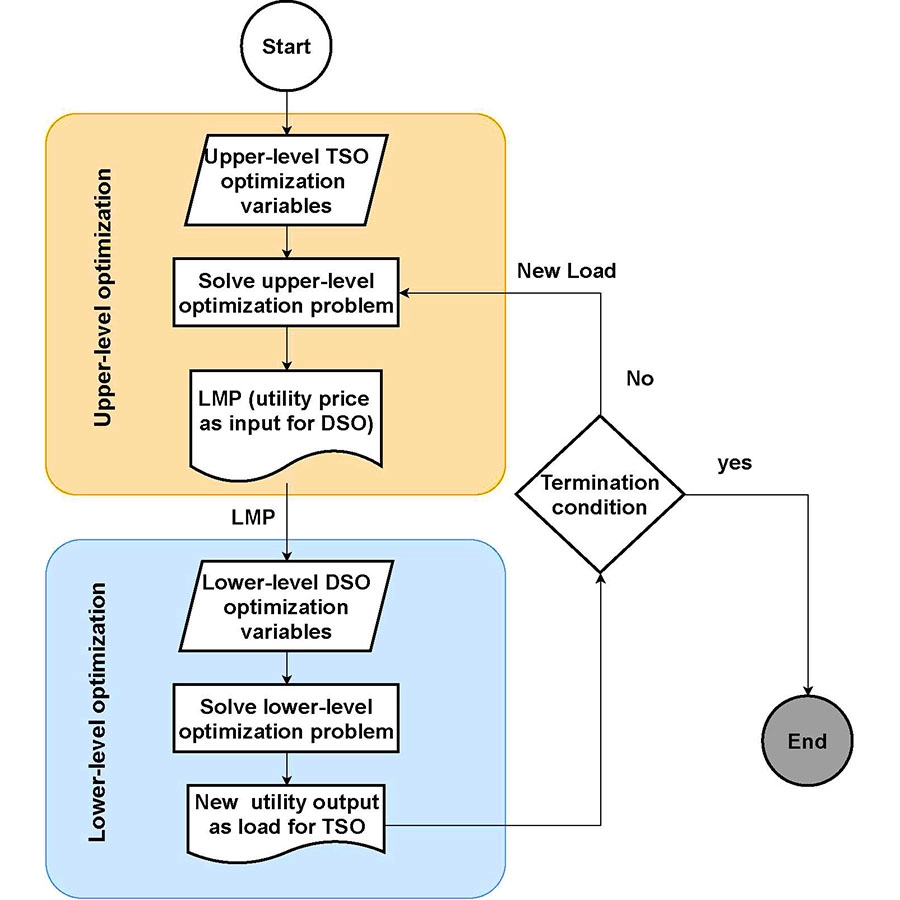
 To fully leverage renewable energy resources there is a need for a new market design with improved coordination between TSOs and DSOs. Our work proposes two coordination schemes between TSOs and DSOs: one centralised and another decentralised that facilitate the integration of distributed based generation; minimise operational cost; relieve congestion, and promote a sustainable system. In the resulting decentralised scheme, the TSO and DSO collaborate to optimally allocate all resources in the system. We study the interaction of TSOs and DSOs and the existence of any conflicting objectives with the centralised scheme. We approximate the Pareto front of the multi-objective optimal power flow problem where the entire system, i.e., transmission and distribution systems are modelled. The proposed ideas are illustrated through a five bus transmission system connected with distribution systems, represented by the IEEE 33 and 69 bus feeders.
To fully leverage renewable energy resources there is a need for a new market design with improved coordination between TSOs and DSOs. Our work proposes two coordination schemes between TSOs and DSOs: one centralised and another decentralised that facilitate the integration of distributed based generation; minimise operational cost; relieve congestion, and promote a sustainable system. In the resulting decentralised scheme, the TSO and DSO collaborate to optimally allocate all resources in the system. We study the interaction of TSOs and DSOs and the existence of any conflicting objectives with the centralised scheme. We approximate the Pareto front of the multi-objective optimal power flow problem where the entire system, i.e., transmission and distribution systems are modelled. The proposed ideas are illustrated through a five bus transmission system connected with distribution systems, represented by the IEEE 33 and 69 bus feeders.
The code is accessible via this page:
TSO-DSO
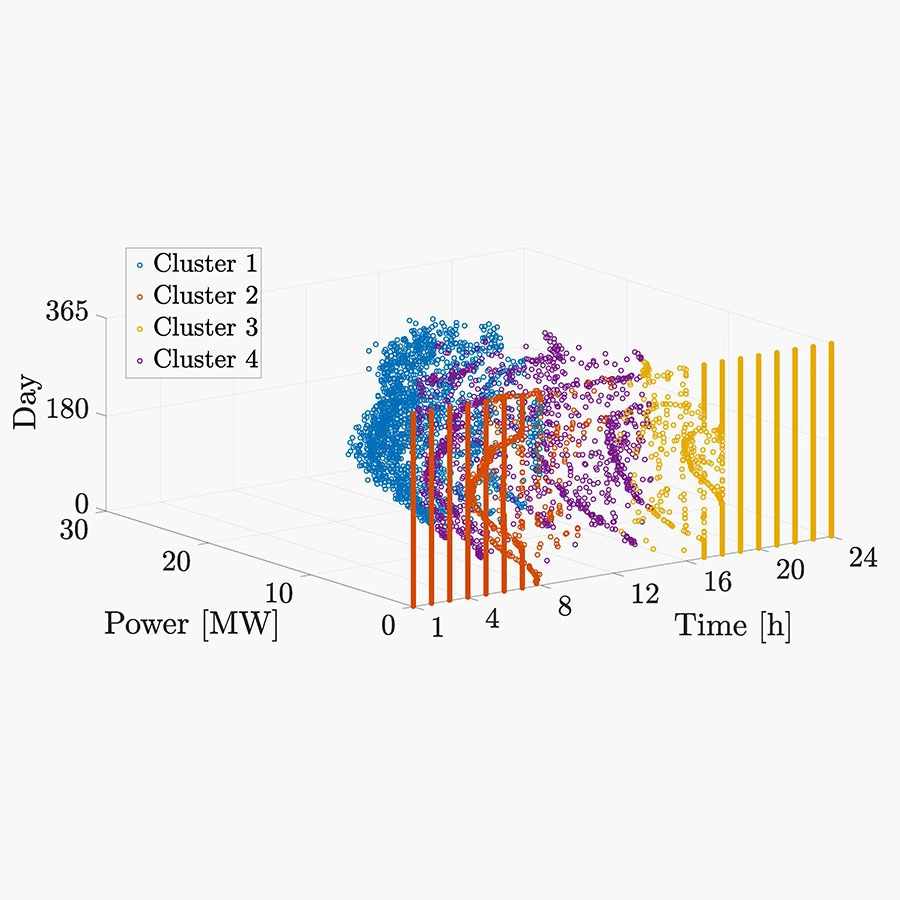 This is a novel probabilistic framework to predict short-term PV output taking into account the variability of weather data over different seasons. To this end, we go beyond existing prediction methods, building a pipeline of processes, i.e., feature selection, clustering and Gaussian Process Regression (GPR). The average error follows a normal distribution, and with 95% confidence level, it takes values between 1.6% to 1.4%. The proposed framework decreases the normalised root mean square error and mean absolute error by 54.6% and 55.5%, respectively, when compared with other relevant works.
This is a novel probabilistic framework to predict short-term PV output taking into account the variability of weather data over different seasons. To this end, we go beyond existing prediction methods, building a pipeline of processes, i.e., feature selection, clustering and Gaussian Process Regression (GPR). The average error follows a normal distribution, and with 95% confidence level, it takes values between 1.6% to 1.4%. The proposed framework decreases the normalised root mean square error and mean absolute error by 54.6% and 55.5%, respectively, when compared with other relevant works.
The code for this proposal is accessible via this page:
Gaussian regression